ROS4HRI is a comprehensive framework designed to facilitate human-robot interaction (HRI) using the Robot Operating System (ROS). It provides a suite of tools and libraries that enable developers to create intuitive and effective HRI applications.
It includes:
a core standard (REP-155) defining conventions and topics for HRI,
message definitions to represent humans and HRI-related data,
libraries to facilitate the use of these messages in C++ and Python,
a set of skills and actions definitions for common HRI functionalities,
a set of ROS packages implementing perceptions and actions for HRI,
tools to generate ROS4HRI-compliant packages, simulate HRI scenarios, and visualize HRI data.
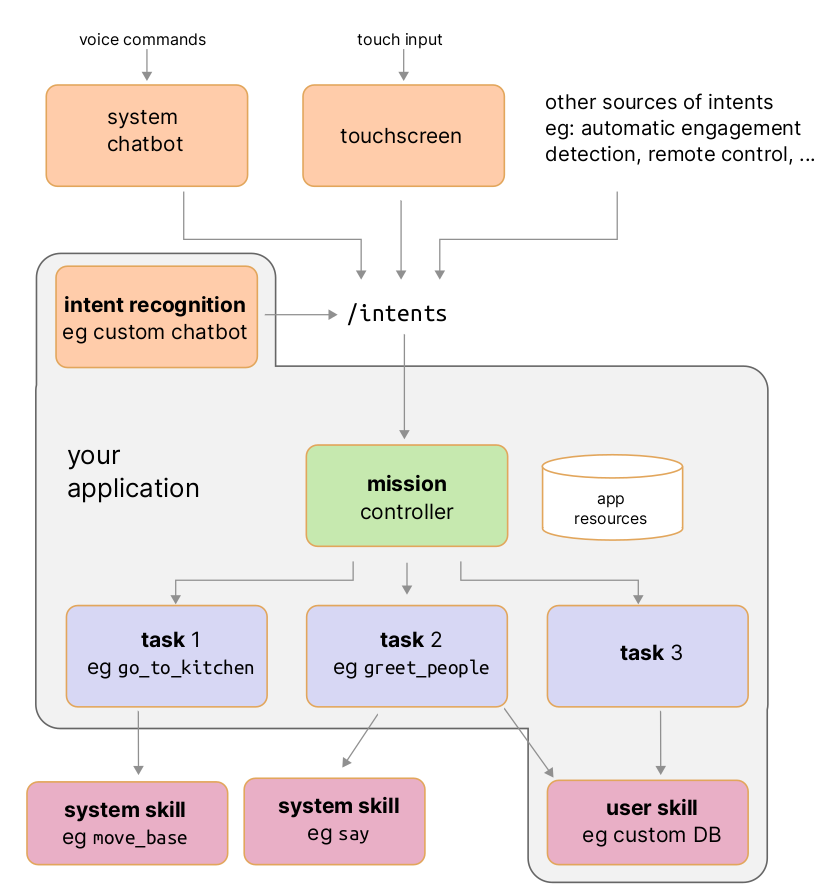
In the context of the ARISE project, ROS4HRI provides:
a standard way to represent humans and interactions with humans,
a standard architecture to implement interactive, human-aware robot applications,
a library of standard skills definitions to implement capabilities on your robots that are compatible with ARISE and the broader ROS4HRI ecosystem.
Please refer to the ROS4HRI documentation for more information.